Autonomous Mobility Platform
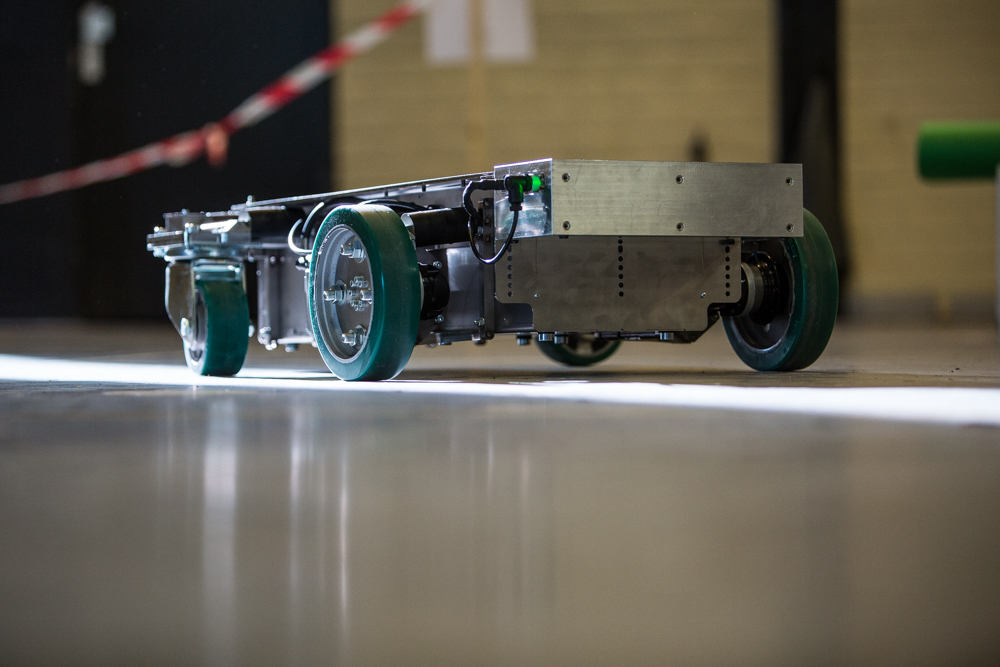
One platform, many uses. Thanks to easy-to-adapt architecture!
One platform, many uses
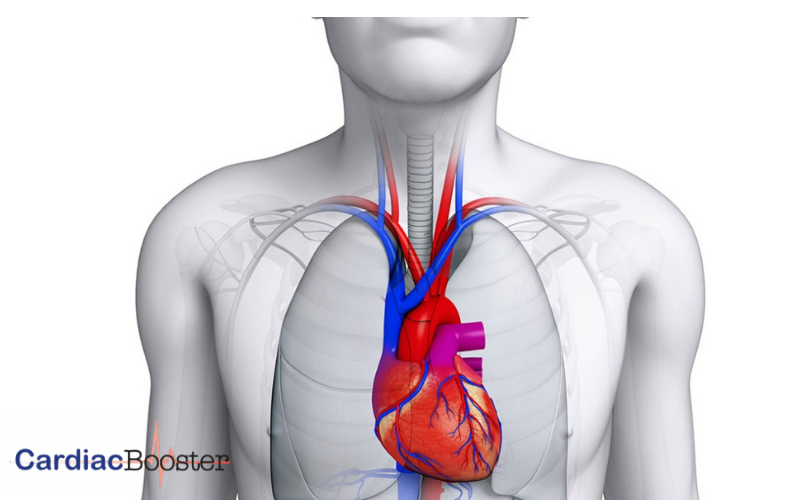
Each new autonomous vehicle has its own unique set of performance criteria. And each new autonomous vehicle requires its own autonomous mobility system. Unfortunately, designing and developing a new autonomous mobility system can be both time-consuming and expensive.
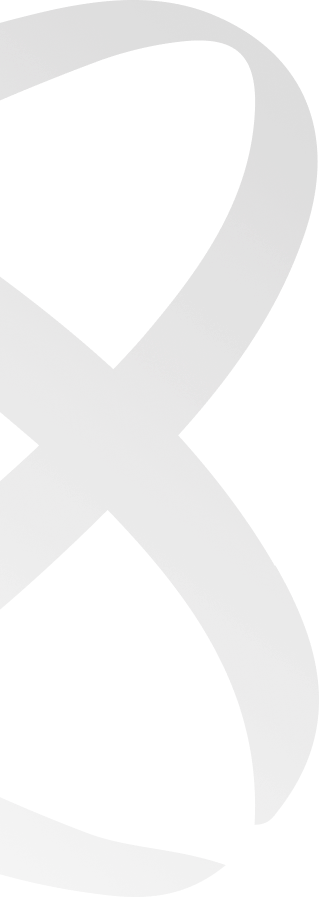
That’s why we have developed a generic Autonomous Mobility Platform. A platform that is especially easy to adapt and fine-tune to the specific tasks of the application. This gives our customers a valuable head start in the development process. It also saves them both time and money, but they still get an autonomous mobility system that is ‘purpose-built’ for their application.
We’ve achieved this adaptability by using generic hardware which can easily be extended and modified. We’ve also developed a powerful set of Open Source ROS software, so the customer is not confined and can shop around for the most competitive modules. In fact we are rather proud of contributing so much to the Open Source community, it’s a powerful example of how we energetically support the ideals of autonomous intelligent systems. We know that these systems help make the world a safer and healthier place, and the investments we’ve made in developing our mobility platform make it quicker, easier and cheaper for our customers to bring their autonomous vehicles to market.
Nobleo Technology Autonomous Mobility Platform
- One platform – many uses
- Easy to adapt – generic hardware, Open Source software
- Faster time to market for new products ideas
- Highly cost efficient
- No lock-in, no software licenses