Nobleo SLAM: A Flexible 3D LiDAR SLAM Solution for Robotics and Mapping
Discover Nobleo's SLAM, a flexible 3D LiDAR SLAM solution for robotics, logistics and mapping. Achieve <1% pose error.
What is SLAM?
Most SLAM systems fall into one of two categories:
- Easy to understand and modify, but with limited performance
- High-performing, but complex and difficult to adapt
At Nobleo, we set out to break this trade-off. Backed by an MIT-R&D subsidy, we developed Nobleo SLAM: a flexible 3D SLAM stack that is both accessible and high-performing.
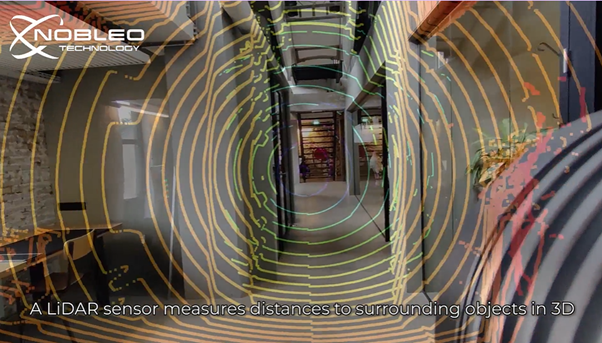
SLAM stands for Simultaneous Localization and Mapping: the process of building a map of an environment while tracking your position within it. Nobleo SLAM can use data from a 3D LiDAR create an accurate 3D map of the environment. This map could enable precise navigation for robotics, logistics, or inspection applications.
High-Performance C++ Core with ROS2 Integration
Nobleo SLAM is built in C++ for maximum performance and efficiency. A ROS2 interface makes it simple to connect with a wide range of sensors and robotics platforms. We’ve validated the algorithm on leading LiDAR sensors from RoboSense and Velodyne, ensuring compatibility with industry-standard hardware.
Thanks to its optimized architecture, Nobleo SLAM runs faster than real time on a modern laptop. It delivers precise mapping without the need for specialized high-end hardware. This means you can deploy it quickly, whether in the lab, in the field, or on the factory floor.
A Handheld 3D LiDAR Mapping Setup
To simplify data collection, we created a handheld mapping setup that lets you walk through a site carrying a 3D LiDAR. This avoids having to mount a LiDAR on a robot which introduces many difficulties.
Benchmarking performance: <1% Pose Error on KITTI
We’ve tested this system extensively, indoors and outdoors, with datasets recorded using our handheld setup. On the well-known KITTI Odometry benchmark, Nobleo SLAM achieves a relative pose error of <1%, putting it in the league of the most advanced systems without the usual complexity.
Designed for Deep Integration & Customization
What sets Nobleo SLAM apart is its flexibility for deep integration. Want custom visualizations? Or to map application-specific features in real time? Our stack is designed to be extended and adapted for your exact needs, something that’s much harder with conventional SLAM frameworks.
Whether you’re in robotics, logistics, or infrastructure inspection, Nobleo SLAM gives you the performance you need with the adaptability you want.
Curious how it works in your setup? See it in action in the video below or get in touch via the contact form to explore how it could fit your application.
Let’s build smarter maps, together.