We transform OEM equipment into intelligent autonomous robot solutions that drive efficiency and innovation. From advanced mapping and navigation to machine vision and fleet management, our expertise covers the full autonomy stack. With tailored solutions, we help you stay ahead in an automated world.
Harness the power of autonomous systems with Nobleo
Transform your machines into intelligent autonomous systems that boost productivity and innovation. As a robotics expert, Nobleo transforms OEM equipment into advanced autonomous solutions.
Our expertise spans the complete autonomy stack – from advanced mapping and navigation to sophisticated machine vision and fleet management. Whether you’re looking to automate existing machinery or develop next-generation autonomous systems from the ground up, our team provides end-to-end support through every phase of your journey.
What sets us apart is our flexible, customer-centric approach. We don’t believe in one-size fits all solutions. Instead, we leverage our extensive software portfolio and cross-industry expertise to create customised autonomous solutions that perfectly align with your specific needs and challenges. Our proven track record includes successful deployments across agriculture, renewable energy and industrial applications.
By applying cross domain innovation, we combine knowledge from multiple engineering disciplines within Nobleo to create smarter, more effective solutions. This integrated expertise allows us to tackle complex challenges with a broader perspective, delivering autonomous systems that seamlessly integrate software, mechatronics and high-tech engineering.
Our middleware solutions, built on ROS 2, enable scalable and maintainable robotic architectures. These frameworks empower engineering teams to tailor, extend and independently maintain their systems over time. Ensuring long-term flexibility and technical ownership.
Partnering with Nobleo means accelerating your autonomous future and staying ahead in an increasingly automated world. Let’s transform your vision into reality!
Key technical capabilities
Robot Software Solutions
Developing sophisticated robotic software including navigation, mapping, behavioral, and control systems for complex automated operations.

Hardware integration
Complete hardware integration services, from sensor selection to custom driver development and mechanical modifications.
Computer Vision
Advanced vision solutions for object detection, recognition, and environmental understanding.
Fleet management
Robust fleet management systems enabling seamless updates and monitoring for large-scale robot deployments.

ROS 2 migration
Expert guidance in ROS to ROS 2 migration, ensuring continuity as ROS Noetic approaches EOL.
Read more>>>
Robot Software Solutions
Developing sophisticated robotic software including navigation, mapping, behavioral, and control systems for complex automated operations.
Hardware integration
Complete hardware integration services, from sensor selection to custom driver development and mechanical modifications.
Computer Vision
Advanced vision solutions for object detection, recognition, and environmental understanding.
Fleet management
Robust fleet management systems enabling seamless updates and monitoring for large-scale robot deployments.
ROS 2 migration
Expert guidance in ROS to ROS 2 migration, ensuring continuity as ROS Noetic approaches EOL.
Read more>>>
Assets
Nobleo Autonomy Core
At the heart of our autonomous robot solutions is the Nobleo Autonomy Core, a comprehensive suite of proprietary and open-source software tools including:
- SLAM (Simultaneous Localization and Mapping)
- Advanced localization algorithms
- Autonomous navigation systems
- Sophisticated behavioral planning
- Precision robot motion control
- Multi-sensor fusion framework
- Robust CI/CD pipelines
Some of our own open-source tools that can be seen here have gained significant community recognition, demonstrating our commitment to quality and innovation in the robotics field.
Industries we serve with our autonomous robot knowledge
- Energy
- Agri & Food
- Industrial systems & automation
- Mobility
- Martime
Applications of our Autonomous robot solutions
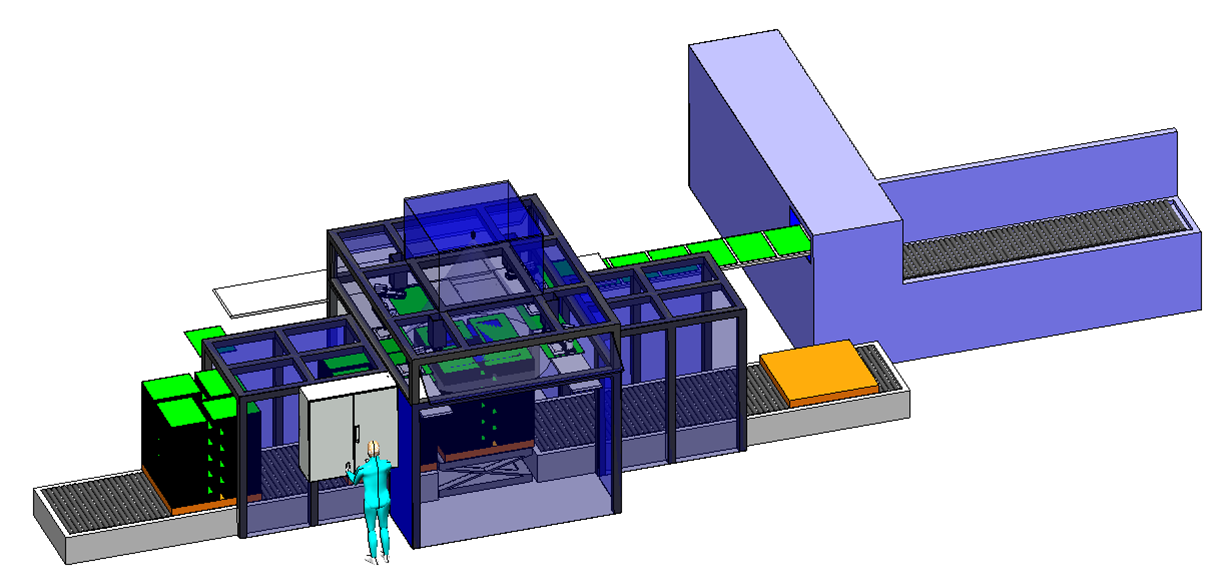
- Automated windmill blade inspection systems
- Autonomous farming: plowing, sowing and harvesting
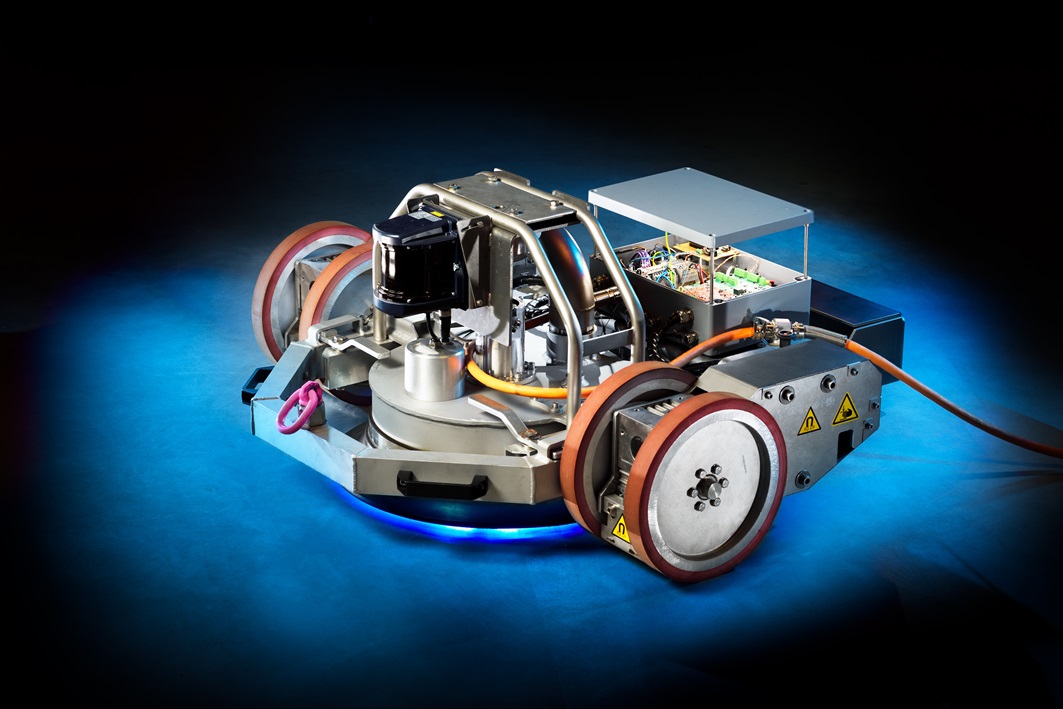
- Semi-autonomous tank cleaning and inspection robots
- Intelligent ship docking assistance systems
- Autonomous vessel navigation and underwater inspection
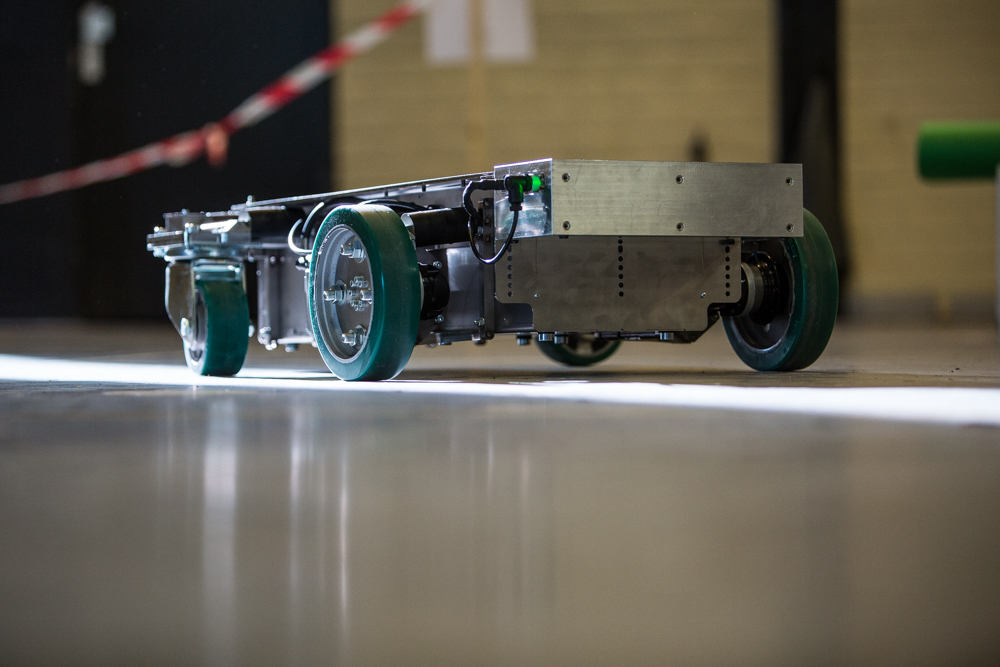
Some of our autonomous robot solutions work





Contact us for more information about our Smart Robot Solutions
"*" indicates required fields
Can I help you?

Trusted by industry leaders