Harm Schepens is featured in Mikroniek
Published on 11 Nov 2021
11 Nov 2021
Harm Schepens is featured in Mikroniek
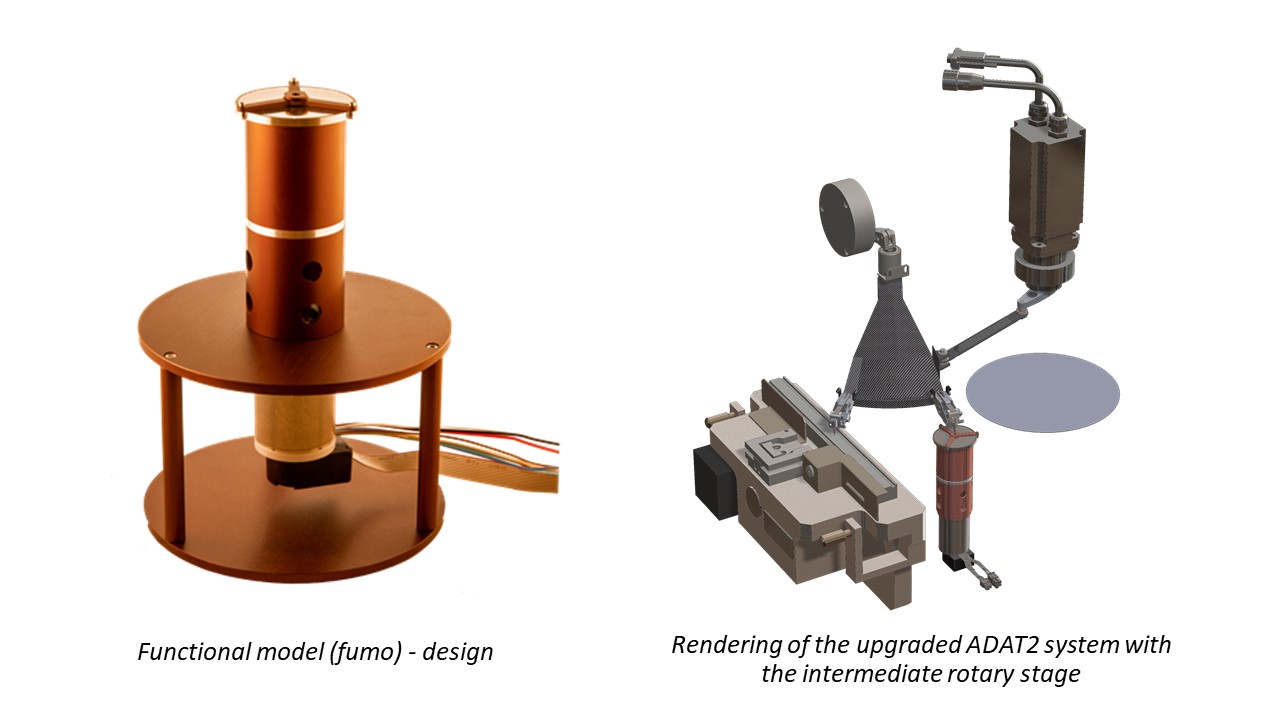
Noblean Harm Schepens is featured in Mikroniek’s 5th issue with his thesis on extending ADAT2 equipment lifetime.
You can read the full article here